Technology
Subsea Vehicles
Subsea Vehicle Technology: Expanding Mission Potential
Advances in robotics are enabling subsea missions to be more common-place, more ambitious and less dependent on specialist … or support vessels.
By Wendy Laursen
Developments in the subsea vehicle market continue to follow the trend lines set out decades ago when subsea robotics started to enter the mainstream in science, business and defense: smaller, cheaper yet more capable, literal ‘force multipliers’ that enable the end user to more efficiently and cost-effectively find and retrieve the results that they seek.
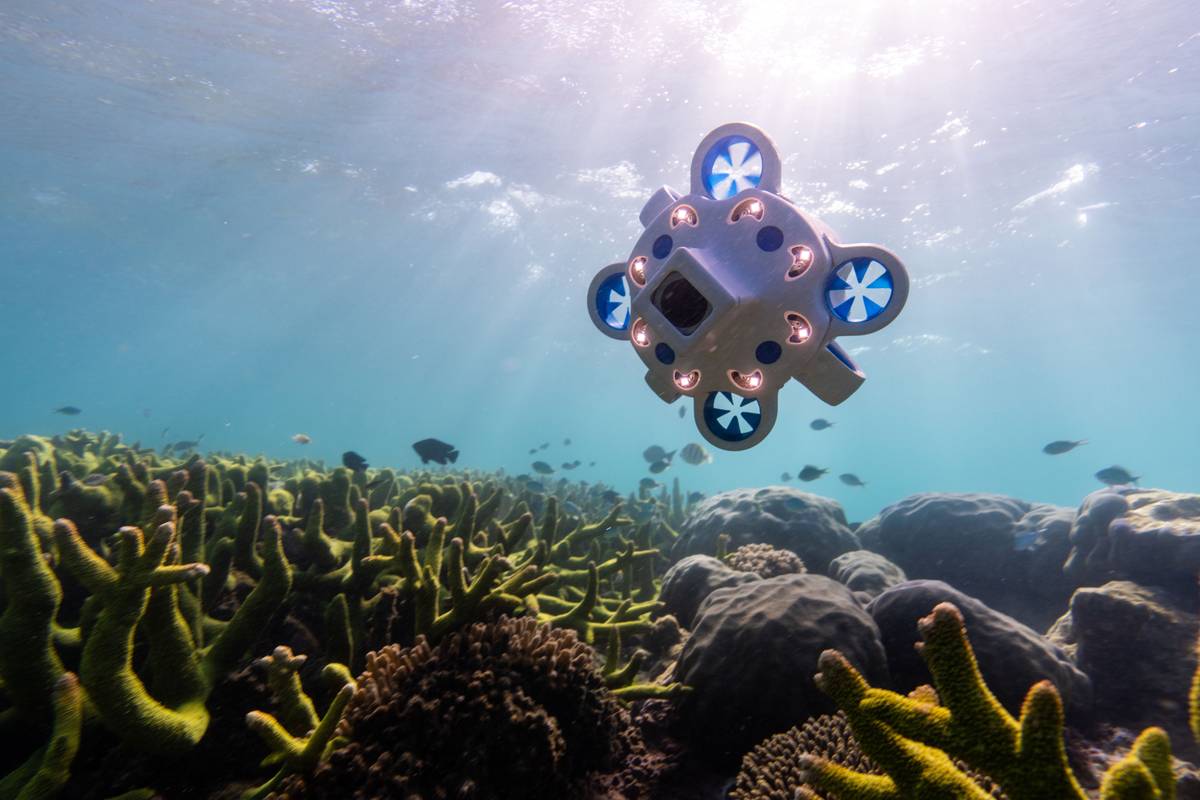
After completing its mission, Advanced Navigation’s micro-AUV can easily be retrieved from a small boat using a crab net. Micro or mammoth, developments in subsea robotics are making it easier for more people to do more things subsea. For Advanced Navigation’s Hydrus that includes coral surveys that would otherwise require diver effort and wreck hunting that would otherwise be cost prohibitive.
It's an industry-wide phenomena.
WATCH! Advanced Navigation’s Hydrus Survey a Shipwreck
“From sensors and robots to ships and software, ocean technology is entering a new era,” says Justin Manley, outgoing President of the Marine Technology Society. Powerful software, including AI, combined with more accessible hardware, broadens the scope of applications for marine robots. “Today there are ocean robots, including uncrewed undersea vehicles (UUVs) and uncrewed surface vehicles (USVs), that cost less than a base model, full-size, luxury sedan. While this is not exactly ‘cheap’ it does allow for a larger volume of sales and new customer applications.”
New applications are emerging in offshore wind. In November, Beam unveiled Scout, an AI-powered AUV designed to be self-driving and independently perform offshore wind inspections, only reporting back at the end of the mission. Beam intends for Scout to be deployed directly from existing crew transfer vessels during routine visits to turbines. This will enable a wider pool of people to confidently manage subsea maintenance on wind farms, helping to alleviate the skills gap that threatens the sector’s ability to scale, says Beam. This new way of conducting operations will also eliminate the need for expensive, third-party services, so once infrequent inspections can become routine management.
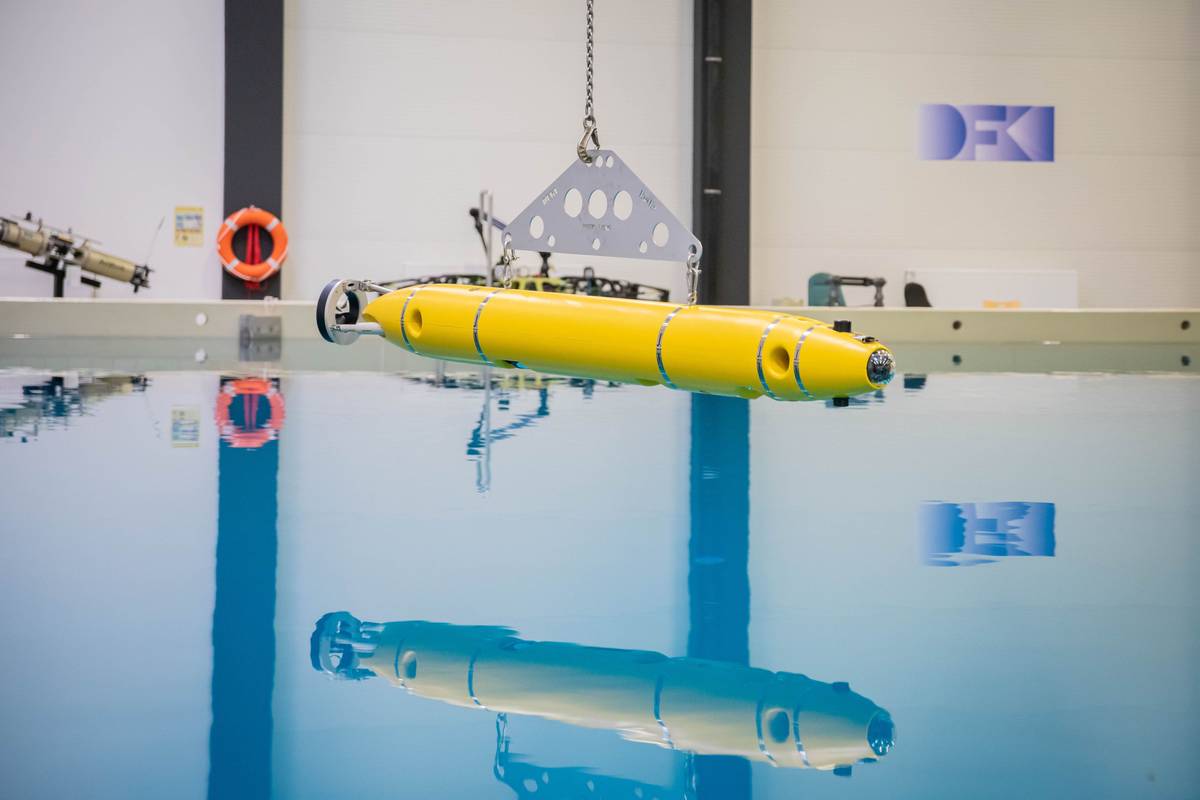
The German Research Center for Artificial Intelligence (DFKI) is supporting RWE’s offshore windfarm operations by equipping an AUV with sensors and AI technologies that will enable RWE to capture a range of ecological data to assess any impacts its farms have on local marine life. The AI functionality includes a video monitoring system that will enable the AUV to detect fish and marine mammals, removing the need for more invasive, CO2-intensive methods such as trawling.

For oil and gas, DeepOcean has developed an Autonomous Inspection Drone (AID) that can stream vessel position and inspection data from the AID back onshore to a digital twin. The AID is based on a Rover MK2 ROV from Argus Remote Systems, with Argus also providing the navigation system. DeepOcean is providing the digital twin platform, mission planner software and live view of the AID in operation, while Vaarst is responsible for the machine vision camera system used for autonomous navigation and data collection.
The AID measures 1.25 x 0.85 x 0.77 meters, weighs just more than 700 lbs. in air and can operate in water depths down to 3,000 meters. It can ‘fly’ in DP mode and has station-keeping and remote-control functionality. DeepOcean will deploy the AID on what is its largest contract to date, an eight-year IMR contract for Equinor-operated assets on the Norwegian continental shelf and in Europe.
There’s increasing demand for polar-capable robots in oceanography. RTSYS’s NemoSens micro-AUV was recently deployed on Leg 4 of the 2024 Amundsen Expedition with an upside-down side scan sonar that was used to examine the underside of the ice. Pierre-Alexandre Caux, Business Director at RTSYS, sees the AUV market moving in two architectural opposite ways: the needs of micro AUVs for very light logistics, cost reduction and ease of use, and a new market for extra-large AUVs with maximum endurance, intelligence and payload integration.
Gliders have also been doing a lot of work under ice. Steve Woodward, Engineering Manager – Gliders, at the National Oceanography Centre (NOC), says: “Trends around the use of gliders include the use of multiple vehicles tracking and interacting with each other using acoustic communications between platforms. There’s also an increasing mix of gliders and other vehicles, such as Autosub Long Range (ALR), on the same project. This is being driven by scientists wanting to get a more complete picture of the environment.”


Mission endurance is also increasing to satisfy this desire. “Our longest glider mission is 240 days. The longest we know about is over 400 days. Fairly regular deployments are around 6-10 months. At NOC, we’re also close to doing one-year missions.” The driver for that is the ability to gather a full year of data, so scientists can see seasonal changes.
Dr Alexander Philips, Head of Marine Autonomous and Robotic Systems at NOC, also sees a strong trend in over-the-horizon and long-endurance operations using AUVs. “At NOC, we’re now getting six weeks out of missions, driven by science needs, but with industry keen to use as well.
“Historically, you have a work class AUV deployed from a ship, it maps for 36 to 72 hours, then it’s recovered, the data downloaded, the vehicle recharged and then put back out again. This has been the standard operation since the mid-1990s. With longer endurance, over-the-horizon operations, vehicles can be deployed from shore to transit in low-power mode to a work site, do multi-beam or side-scan work, then return to shore.”
This is building the concept of shipless operations which can extend operational windows because good weather is only needed to deploy the AUV, and it tends to be better inshore. “Examples of this type of operation include the work we’ve been doing on the joint BIO-Carbon and Future Marine Research Infrastructure program earlier this year. This saw the use of our Autosub Long Range (ALR) AUVs equipped with a suite of sensors to analyze the biology and chemistry of the ocean. One was deployed from shore in Iceland and made a full transit across the Iceland Basin over to Harris in the Scottish Outer Hebrides – the first country-to-country deployment for an ALR.”

Fuel cells could soon be another option for extending mission time. Infinity Fuel Cell and Hydrogen, Inc. have been awarded a contract to develop a fuel cell power system capable of installation in a UUV. This could bring the cost of extended commercial missions down and provide a tactical advantage for military missions.
Meanwhile, Kongsberg Discovery has taken advantage of recent developments in pressure-tolerant lithium-ion battery technology to undertake a multi-week fully autonomous mission with its HUGIN Endurance AUV. After receiving a final navigation update from a pre-deployed transponder 10 hours into the dive, the 8-ton, 40-ft AUV operated independently of human interaction and with no external navigation aiding while it conducted a mission at depths ranging from 50 meters to 3,400 meters for 1,200 nautical miles. It returned with a position error of approximately 0.02% of its total distance traveled.
WATCH! EvoLogics Quadroin Bionic Underwater Robot
Navigation precision is also evolving on smaller vehicles. EvoLogics has released a new iteration of its Quadrion AUV featuring AI-powered object detection and automatic collision avoidance. Llewellyn Fernandes, Senior Electronics Engineer – Robotics at EvoLogics, sees growing demand for smaller, swarm-capable vehicles. “The reduced size allows for deployment and operation by a single person, while their swarming capabilities enable coverage of larger areas in less time. These versatile vehicles can be used for hydrographic surveys, underwater search and rescue and critical infrastructure and harbor monitoring.” The latest generation Quadroins can be equipped with side-scan sonar, underwater cameras and water quality sensors, as well as advanced navigational sensors for these applications.
Boxfish Robotics has released an AUV Research Kit designed to help scientists and engineers develop and deploy custom computer vision algorithms by removing the need for extensive equipment setup, testing and preparation. The hardware includes a 300-meter depth-rated housing, machine vision cameras, high CRI lighting for optimal visibility and advanced USBL and DVL positioning systems. It also supports the addition of a diverse range of other sensors and tools.
AI is being adopted in the ROV market as well. QYSEA Technology has launched the next generation of its ROV, the FIFISH E-MASTER, which includes an AI-powered underwater measurement system. This enables real-time analysis of underwater objects, fractures and damage with high accuracy based on multiple measurement methods. Users can leverage the post-processing system for enhanced multi-measurement accuracy or use the FIFISH APP to measure objects efficiently in real-time using a virtual ruler.

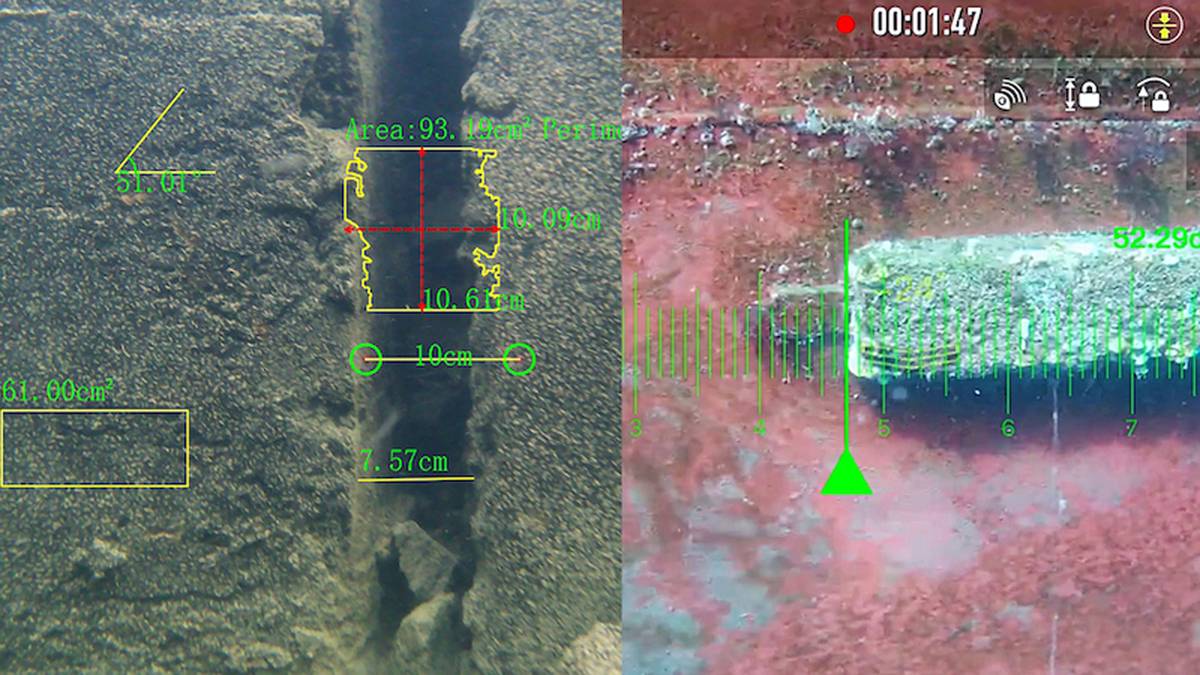
FIFISH E-MASTER’s autonomous operation is supported by an inertial navigation system that combines deep learning with sensor data for precise positioning, velocity, heading and attitude. It also enables automated mission planning, one-click return-to-home and real-time motion tracking with visual overlays of historical paths.
Blueye Robotics’ ROVs are now capable of operating without manual control. Before deploying the ROV, the operator can set instructions in the Blueye app, press the start button and then let the ROV take over. The mission planner function allows the operator to create a list of instructions that will be executed automatically. With this feature, the ROV can navigate to a waypoint, dive to set depths, hold its position, capture photos at specific distances or time intervals and start and stop recordings.
Deep Trekker has released new underwater positioning technology, ROV GPS, that delivers continuous real-time recalibration, allowing operators to track their ROV precisely when surfaced. To achieve the highest accuracy, ROV GPS supports Real-Time Kinematic (RTK) and Satellite-Based Augmentation System (SBAS) corrections. RTK integration enables positioning accuracy of up to 2.5 centimeters, and the system supports major satellite constellations, including GPS, GLONASS, BeiDou and Galileo.
Director of Sales and Marketing, Cody Warner, says ROVs are at a critical stage of development. “There are major inroads into 3D model development, live 3D environment interpretation, autonomy, AI for data organization and classification, families of unmanned systems, augmented reality for control systems and miniaturization of sensors. All of these have high potential to solve real world problems and provide value. The question that everyone is racing to figure out is which options will net the greatest impact.
“ROVs are used across a variety of applications, so choosing just one will be important for some and not others. I believe that 3D interpretation, both live and in post development, is the most critical, as it helps answer key questions for all ROV operators: Where am I and where have I already been?”
Warner says a variety of sensors will change the world of 3D, including 3D sonars and stereo cameras. “Our partners at Water Linked have an excellent path to success on this front with their new miniature 3D sonar. Stereo camera producers are also continuing to drive cost and size down to help make the technology more successful. As this matures, the 3D capabilities will enable AI and autonomy to have a bigger impact, as there will be more accessible repeatable and reliable data sets to build upon.”

Saab UK’s new Seaeye SR20 ROV is designed for operational concepts such as resident deployment and over-the-horizon control. “The market for the Seaeye SR20 is seeing significant growth and interest – driven by the increasing complexity of underwater operations and the need for enhanced efficiency, safety, sustainability and increased performance,” says Chris Lade, Head of Marketing & Sales (Naval) at Saab UK.
Several factors are contributing to this transformation. “One of the most significant advancements is the shift towards electric power and greater autonomy in underwater systems. Traditional hydraulic systems, once the norm for underwater robotics, are being replaced by more energy-efficient, environmentally friendly electric alternatives that deliver increased reliability. These systems, such as the SR20, are not only more cost effective to operate, but also reduce the environmental impact by lowering CO2 emissions and minimizing the risk of oil spills.”
Another driving factor is the growing demand for deeper, more complex underwater missions, particularly in defense and scientific research. Technologies like the SR20, operational at depths of around 3,000 meters, can enable operations that were previously impossible. The next frontier is even deeper – up to 6,000 meters– as deeper ocean environments are evaluated for critical infrastructure, environmental monitoring and defense.
“ROVs and AUVs play a pivotal role in safeguarding critical underwater infrastructure, creating a new realm of warfare, a domain that has gained prominence as recent events have clearly demonstrated to nations the vulnerability of their submerged strategic assets,” says Lade.
AUVs allow real-time monitoring of vulnerable areas, detecting potential threats, and then, supported by ROVs, for enabling rapid intervention as required. “One of the key advancements in this sector in recent years is the ability for ROVs/AUVs to operate from subsea docking stations or small, lightly crewed vessels, reducing the need for large surface ships – cutting deployment costs, time and delivering underwater persistence. These systems, like Saab’s Sabertooth, are highly versatile, operating autonomously and capable of maneuvering in tight spaces or harsh conditions where traditional methods would struggle.”